Lasery v meteorologii
Lidary jsou laserové radary používané k měření částic v otevřené atmosféře. Laserový paprsek je pro měření vhodný kvůli své nízké divergenci. Zdrojem lidarového dálkoměru musí však být laser s krátkou a dobře definovanou náběhovou hranou laserového impulsu (<1ns). Pro vzdálenost měření do 1 kilometru se využívá GaAs laser (Δl≈10 cm), do 10 kilometrů pak Nd:YAG laser (Δl≈1 m). K zjišťování vzdáleností družic, pohybu kontinentů a nebo gravitačních anomálii (1 000 kilometrů) se využívá rubínový laser 1 ns/109 W Δl≈(1-10)m.
Princip fungování Lidaru je založen na tom, že sledujeme jak se chová a mění laserový paprsek vyslaný do atmosféry. Laserový paprsek se zde částečně odráží a částečně rozptyluje molekulami a aerosoly nebo se odráží na odražeči. V atmosféře může dojít k několika různým druhům odrazů.
Odraz záření od instalovaného odražeče
Paprsek nasměrujeme do atmosféry a záření se vrací zpět po odrazu od odražeče, který je instalován ve vzdálenosti 100 metrů až 10 kilometrů od zdroje. Abychom zabránili absorpci na základních atmosférických komponentech, potřebujeme volit vlnovou délku laseru 9-13 µm. Tato metoda je velmi jednoduchá a experimentálně nenáročná. Příchozí signál při využití této metody nám dává informace o dění na celé optické dráze, kdy však nelze zjistit koncentraci látek. Vhodným laserem pro tuto metodu může být i málo intenzivní polovodičová dioda.
Zpětný rozptyl na topografických překážkách
Tento rozptyl je všesměrový a pro detekci se využívá jen část záření, které se vrací ve směru teleskopu. Přijímací optika a elektronika musí splňovat vysoké nároky. Pro tento typ detekce je využíván výkonný pulzní laser. Z měření získáme informace o celé optické dráze, a také o střední koncentraci sledované látky, avšak nemůžeme určit prostorové rozložení koncentrací.
Rozptyl na molekulách a aerosolech
První rozptyl, na který se zaměříme, je rozptyl Mieův. Mieův rozptyl probíhá na částečkách aerosolu. Mieova teorie je obecná a dá se využít pro výpočet rozptylu na sférických částicích libovolné velikosti a pro částice elektricky nabité. Je však velmi složitá na rozdíl od Rayleighovy teorie. Rayleighova teorie však musí splňovat dvě podmínky:
– rozptylující částice musí být elektricky nevodivé
– musí být splněna relace: , kde r je poloměr rozptýlené částice a λ je vlnová délka.
Rayleighův rozptyl je založen na rozptylu světla na molekulách plynu a nebo jiných častic, které jsou menší než vlnová délka záření. Rayleighův rozptyl také dokazuje, že světlo s kratší vlnovou délkou se rozptyluje více, než světlo s vlnovou délkou delší. Tím si můžeme vysvětlit, proč je obloha modrá.
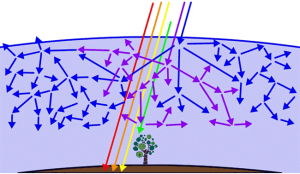
Obr.1: Odrážení různých vlnových délek v atmosféře.
Posledním druhem rozptylu, ke kterému dochází v atmosféře je rozptyl Ramanův. K rozptylu dochází při střetu záření s molekulou. Po nárazu má rozptýlené světlo jinou vlnovou délku a energii. Při této metodě můžeme molekuly ve vzduchu identifikovat pomocí rotačních a vibračních hladin. Při měření získáme informace o všech molekulách, se kterými se paprsek při letu srazil. Můžeme tedy díky tomu určit, jaké sloučeniny jsou v atmosféře přítomné a z měřené intenzity je možné zjistit i jejich koncentraci. Zpoždění signálu poté určuje vzdálenost sloučenin od zdroje.
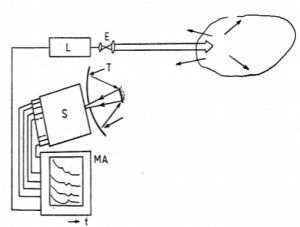
Obr.2: Ramanův LIDAR: L – laser, E – expandér paprsku (kolimátor), T – teleskop, S – spektrometr, MA – multikanálový analyzátor
Vrácený laserový paprsek je na zemi zachycen teleskopem spolu s filtry, fotodetektorem a fotonásobičem. Díky tomu je možné pohltit odražené paprsky, a též paprsky rozptýlené směrem k teleskopu. Abychom byli schopni vypočítat vzdálenosti, potřebujeme vědět odraz a dobu letu laserového paprsku.
Rozptýlený laserový paprsek nám dává informace o složení atmosféry. Díky tomu je možné určit, o jaké molekuly se jedná dle různé frekvence, různé amplitudy a změny v čase. Pokud k naší aparatuře přidáme i spektrometr, jsme schopni určit spektrum přijatého paprsku.
Pomocí použitých zařízení jsme schopni změřit výšku spodní hranice oblačnosti, turbulence, profil mraků, proudění vzduchu v atmosféře, nebo výskyt různých látek v ovzduší.
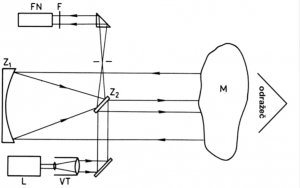
Obr.3: LIDAR: L – laser, VT – vysílací teleskop, Z1 a Z2 zrcadla Newtonova teleskopu, M – monitorovaná oblast, F – filtr, FN – fotonásobič
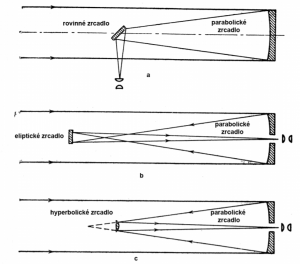
Obr.4: Teleskopy: a – Newtonův teleskop, obraz převrácený; b – Cassegrainův teleskop, obraz převrácený; c – Gregoryho teleskop, obraz přímý


